PULSE
Probabilistic Steering Engine with Adaptive Software Selectively Directs Actions Based on Conditioning and Gating Guided Through Different Levels of Uncertainty: An adaptive system which directs actions according to conditioning using gated modulation that is directed through uncertainty at various levels.
How PULSE Works
Incorporating three innovative features based on recent research into steering controls, Pulse integrates sensor learning for recognizing actuation using conditioning vectors; furthermore, modulation of probabilities is applied such that greater confidence in uncertain model performance leads to stronger control actions; additionally, adjustments vary among different levels which each are independently learned and scaled.
At sensor levels, PULSE determines similarity through latent states compared against learned condition vectors using cosine similarity. When similarity surpasses a previously set threshold level, activation occurs. Subsequently adjustments can be made for steering intensities according to entropy produced from the model; strong activation happens where there is greater uncertainty (higher entropy) among model results.
Successive training using Controlled Activation Alignment (CAA) forms layer upon layer for steering actions alongside inclusion of an explicit optimization phase that focuses on tuning conditioning vectors; such vectors are refined to precisely differentiate high quality positives meant to activate steering mechanisms from negatives which do not activate properly; finally an appropriate threshold value is determined through extensive search through grids with intent to boost performance related to classifying assignments. Emphasis preserved on avoiding task failure by intelligent systems throughout rephrasing.
When to Use PULSE
- Conditional Steering: When you only want to steer on certain types of inputs
- Uncertainty-aware: When steering intensity should depend on model confidence
- Multi-layer Effects: When behavior requires steering at multiple layers
- Dynamic Intensity: When fixed steering strength isn't appropriate for all inputs
- Minimize False Positives: When it's important not to steer on harmless inputs
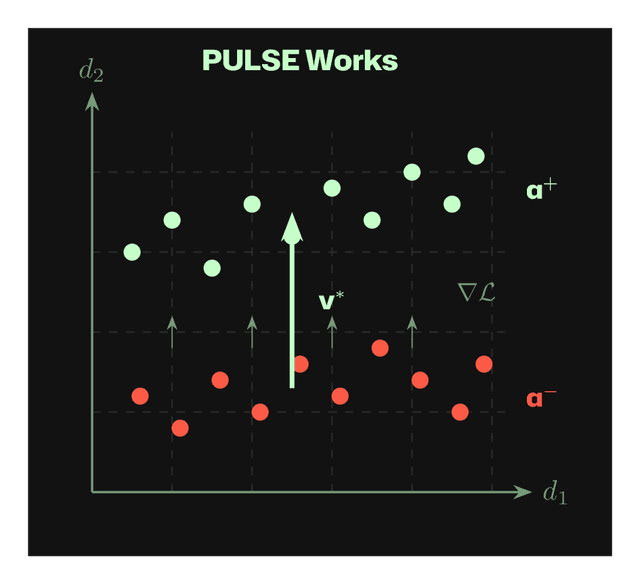
Works: Gradient ∇L guides optimization to find optimal v* across the activation landscape.
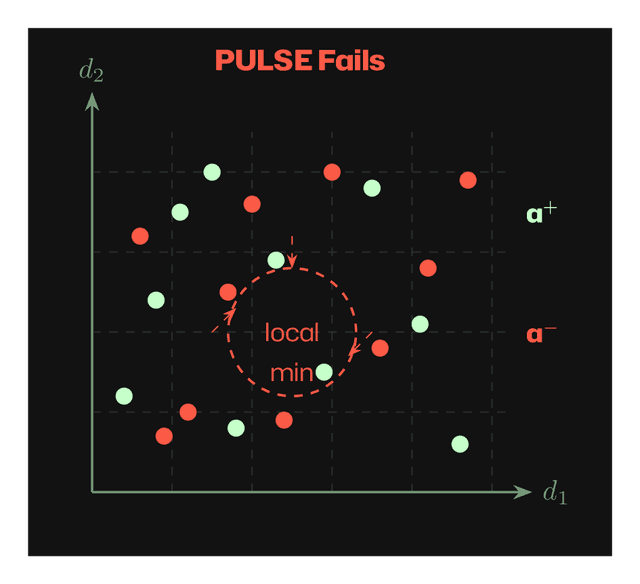
Fails: Random scatter causes gradient descent to get stuck in local minima.
CLI Examples
python -m wisent.cli tasks safety_pairs.json --from-json --steering-mode --steering-method PULSE --layer 15 --save-steering-vector safety_pulse.pt
python -m wisent.cli tasks refusal_pairs.json --from-json --steering-mode --steering-method PULSE --pulse-sensor-layer 18 --pulse-steering-layers 12,13,14,15,16,17 --save-steering-vector refusal_pulse.pt
python -m wisent.cli tasks honesty_pairs.json --from-json --steering-mode --steering-method PULSE --layer 15 --pulse-use-entropy-scaling --pulse-entropy-floor 0.3 --pulse-entropy-ceiling 2.5 --pulse-max-alpha 2.5 --save-steering-vector honesty_pulse.pt
python -m wisent.cli tasks bias_pairs.json --from-json --steering-mode --steering-method PULSE --layer 15 --pulse-learn-threshold --pulse-threshold-search-steps 30 --pulse-optimization-steps 150 --save-steering-vector bias_pulse.pt
Parameters
Layer Configuration
Condition Gating
Uncertainty-guided Intensity
Training Parameters
For the complete implementation of the PULSE steering method in Wisent, see:
Stay in the loop. Never miss out.
Subscribe to our newsletter and unlock Wisent insights.